
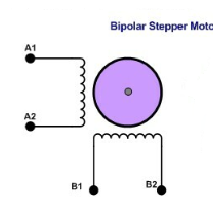
Bipolar Stepper Motor
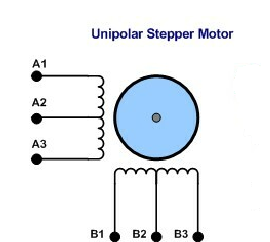
Unipolar Stepper Motor
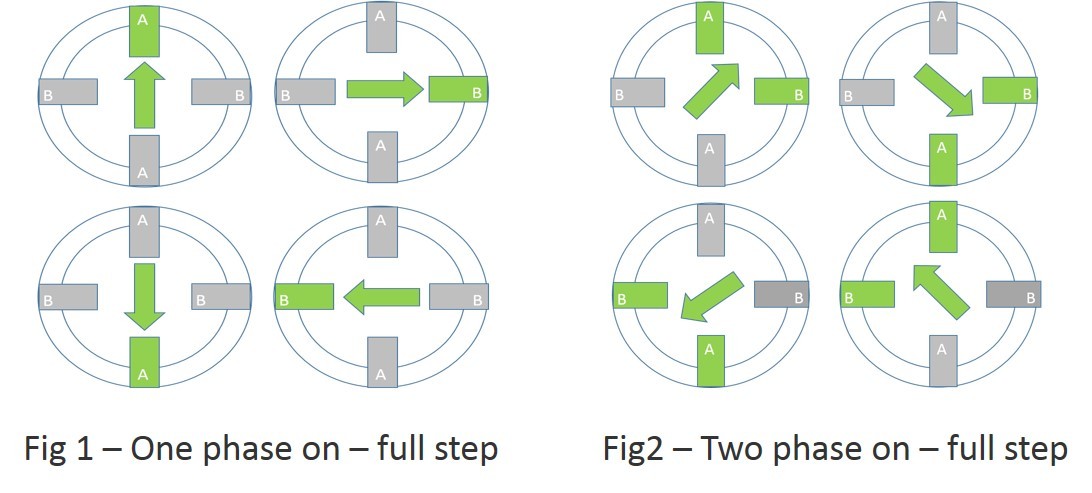
Full Step
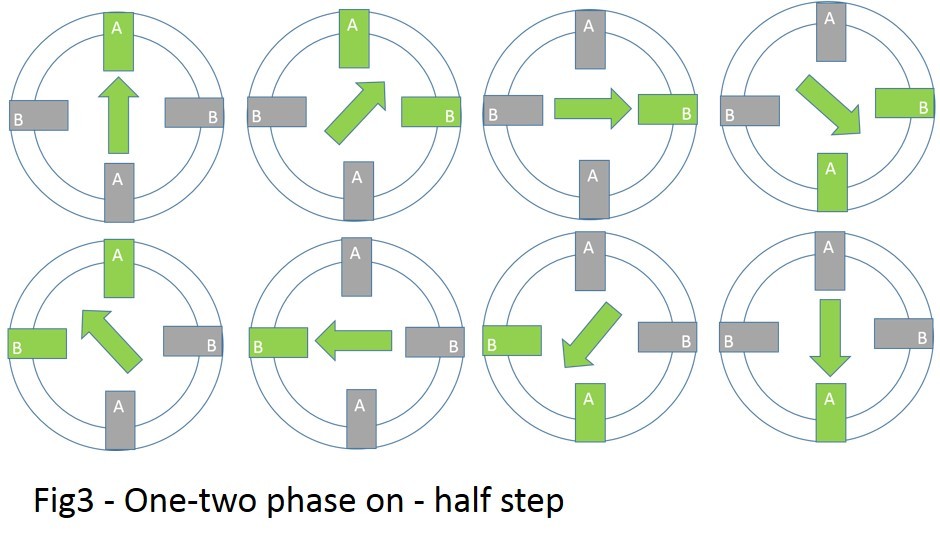
Half Step
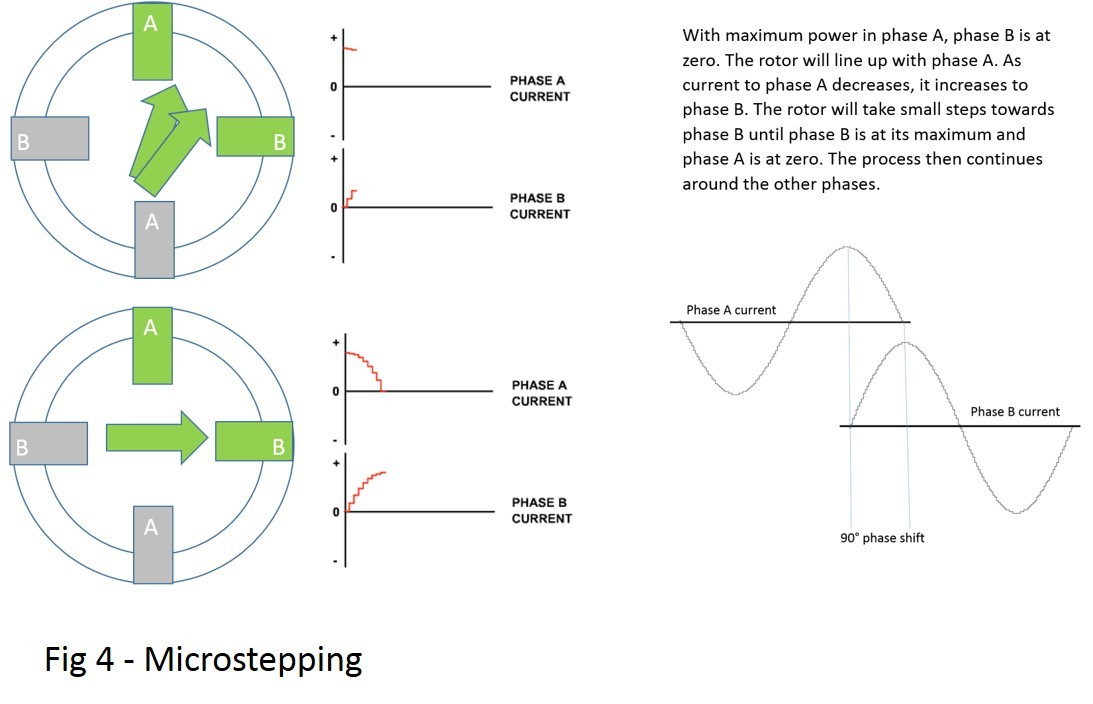
Micro Step
Calculating the Steps per Revolution for Stepper Motor
Need of Driver modules for Stepper motors
/* Name : main.c
* Purpose : Source code for Full Step Drive Unipolar Stepper Motor
Interfacing with Arduino.
* Author : Gemicates
* Date : 08-02-2018
* Website : www.gemicates.org
* Revision : None
*/
#include <Stepper.h> //include the function library
// set pin numbers:
// Pins 1, 2, 3, 4 connected to stepper motor through L293D
const int a1 = 1;
const int a2 = 2;
const int b1 = 3;
const int b2 = 4;
void setup() {
// initialize the digital pins as an output
pinMode(a1, OUTPUT);
pinMode(a2, OUTPUT);
pinMode(b1, OUTPUT);
pinMode(b2, OUTPUT);
// set the pins LOW by making the voltage level LOW
digitalWrite(a1, LOW);
digitalWrite(a2, LOW);
digitalWrite(b1, LOW);
digitalWrite(b2, LOW);
}
void loop(){
step1();
delay(200);
step2();
delay(200);
step3();
delay(200);
step4();
delay(200);
}
void step1 (){
digitalWrite(a1, HIGH);
digitalWrite(a2, HIGH);
digitalWrite(b1, LOW);
digitalWrite(b2, LOW);
}
void step2 (){
digitalWrite(a1, LOW);
digitalWrite(a2, HIGH);
digitalWrite(b1, HIGH);
digitalWrite(b2, LOW);
}
void step3 ()
{
digitalWrite(a1, HIGH);
digitalWrite(a2, LOW);
digitalWrite(b1, LOW);
digitalWrite(b2, HIGH);
}
void step4 (){
digitalWrite(a1, LOW);
digitalWrite(a2, LOW);
digitalWrite(b1, HIGH);
digitalWrite(b2, HIGH);
}
/* Name : main.c
* Purpose : Source code for Half Drive Unipolar Stepper Motor
Interfacing with Arduino.
* Author : Gemicates
* Date : 08-02-2018
* Website : www.gemicates.org
* Revision : None
*/
#include <Stepper.h> //include the function library
// set pin numbers:
// Pins 1, 2, 3, 4 connected to stepper motor through L293D
const int a1 = 1;
const int a2 = 2;
const int b1 = 3;
const int b2 = 4;
void setup() {
// initialize the digital pins as an output
pinMode(a1, OUTPUT);
pinMode(a2, OUTPUT);
pinMode(b1, OUTPUT);
pinMode(b2, OUTPUT);
// set the pins LOW by making the voltage level LOW
digitalWrite(a1, LOW);
digitalWrite(a2, LOW);
digitalWrite(b1, LOW);
digitalWrite(b2, LOW);
}
void loop(){
step1();
delay(60);
step2();
delay(60);
step3();
delay(60);
step4();
delay(60);
step5();
delay(60);
step6();
delay(60);
step7();
delay(60);
step8();
delay(60);
}
void step1 (){
digitalWrite(a1, HIGH);
digitalWrite(a2, LOW);
digitalWrite(b1, LOW);
digitalWrite(b2, HIGH);
}
void step2 (){
digitalWrite(a1, HIGH);
digitalWrite(a2, LOW);
digitalWrite(b1, LOW);
digitalWrite(b2, LOW);
}
void step3 ()
{
digitalWrite(a1, HIGH);
digitalWrite(a2, HIGH);
digitalWrite(b1, LOW);
digitalWrite(b2, LOW);
}
void step4 (){
digitalWrite(a1, LOW);
digitalWrite(a2, HIGH);
digitalWrite(b1, LOW);
digitalWrite(b2, LOW);
}
void step5 (){
digitalWrite(a1, LOW);
digitalWrite(a2, HIGH);
digitalWrite(b1, HIGH);
digitalWrite(b2, LOW);
}
void step6 (){
digitalWrite(a1, LOW);
digitalWrite(a2, LOW);
digitalWrite(b1, HIGH);
digitalWrite(b2, LOW);
}
void step7 (){
digitalWrite(a1, LOW);
digitalWrite(a2, LOW);
digitalWrite(b1, HIGH);
digitalWrite(b2, HIGH);
}
void step8 (){
digitalWrite(a1, LOW);
digitalWrite(a2, LOW);
digitalWrite(b1, LOW);
digitalWrite(b2, HIGH);
}
/* Name : main.c
* Purpose : Source code for Wave Drive Unipolar Stepper Motor
Interfacing with Arduino.
* Author : Gemicates
* Date : 08-02-2018
* Website : www.gemicates.org
* Revision : None
*/
#include <Stepper.h> //include the function library
// set pin numbers:
// Pins 1, 2, 3, 4 connected to stepper motor through L293D
const int a1 = 1;
const int a2 = 2;
const int b1 = 3;
const int b2 = 4;
void setup() {
// initialize the digital pins as an output
pinMode(a1, OUTPUT);
pinMode(a2, OUTPUT);
pinMode(b1, OUTPUT);
pinMode(b2, OUTPUT);
// set the pins LOW by making the voltage level LOW
digitalWrite(a1, LOW);
digitalWrite(a2, LOW);
digitalWrite(b1, LOW);
digitalWrite(b2, LOW);
}
void loop(){
step1();
delay(200);
step2();
delay(200);
step3();
delay(200);
step4();
delay(200);
}
void step1 (){
digitalWrite(a1, HIGH);
digitalWrite(a2, LOW);
digitalWrite(b1, LOW);
digitalWrite(b2, LOW);
}
void step2 (){
digitalWrite(a1, LOW);
digitalWrite(a2, LOW);
digitalWrite(b1, HIGH);
digitalWrite(b2, LOW);
}
void step3 ()
{
digitalWrite(a1, LOW);
digitalWrite(a2, HIGH);
digitalWrite(b1, LOW);
digitalWrite(b2, LOW);
}
void step4 (){
digitalWrite(a1, LOW);
digitalWrite(a2, LOW);
digitalWrite(b1, LOW);
digitalWrite(b2, HIGH);
}
/* Name : main.c
* Purpose : Source code for Bipolar Stepper Motor
Interfacing with Arduino.
* Author : Gemicates
* Date : 08-02-2018
* Website : www.gemicates.org
* Revision : None
*/
#include <Stepper.h> //include the function library
// set pin numbers:
// Pins 1, 2, 3, 4 connected to stepper motor through L293D
const int a1 = 1;
const int a2 = 2;
const int b1 = 3;
const int b2 = 4;
void setup() {
// initialize the digital pins as an output
pinMode(a1, OUTPUT);
pinMode(a2, OUTPUT);
pinMode(b1, OUTPUT);
pinMode(b2, OUTPUT);
// set the pins LOW by making the voltage level LOW
digitalWrite(a1, LOW);
digitalWrite(a2, LOW);
digitalWrite(b1, LOW);
digitalWrite(b2, LOW);
}
void loop(){
step1();
delay(60);
step2();
delay(60);
step3();
delay(60);
step4();
delay(60);
}
void step1 (){
digitalWrite(a1, LOW);
digitalWrite(a2, LOW);
digitalWrite(b1, LOW);
digitalWrite(b2, HIGH);
}
void step2 (){
digitalWrite(a1, LOW);
digitalWrite(a2, HIGH);
digitalWrite(b1, LOW);
digitalWrite(b2, LOW);
}
void step3 ()
{
digitalWrite(a1, LOW);
digitalWrite(a2, LOW);
digitalWrite(b1, HIGH);
digitalWrite(b2, LOW);
}
void step4 (){
digitalWrite(a1, HIGH);
digitalWrite(a2, LOW);
digitalWrite(b1, LOW);
digitalWrite(b2, LOW);
}